 |
|

17.3 Access Bottlenecks
Modern systems frequently need to access data in a highly concurrent manner. For example, large FTP or HTTP servers can maintain thousands of concurrent sessions and have multiple 100 Mbit/s connections to the outside world, well beyond the sustained transfer rate of most disks.
Current disk drives can transfer data sequentially at up to 70 MB/s, but this value is of little importance in an environment where many independent processes access a drive, where they may achieve only a fraction of these values. In such cases it is more interesting to view the problem from the viewpoint of the disk subsystem: the important parameter is the load that a transfer places on the subsystem, in other words the time for which a transfer occupies the drives involved in the transfer.
In any disk transfer, the drive must first position the heads, wait for the first sector to pass under the read head, and then perform the transfer. These actions can be considered to be atomic: it does not make any sense to interrupt them.
Consider a typical transfer of about 10 kB: the current generation of high-performance disks can position the heads in an average of 3.5 ms. The fastest drives spin at 15,000 rpm, so the average rotational latency (half a revolution) is 2 ms. At 70 MB/s, the transfer itself takes about 150 μs, almost nothing compared to the positioning time. In such a case, the effective transfer rate drops to a little over 1 MB/s and is clearly highly dependent on the transfer size.
The traditional and obvious solution to this bottleneck is “more spindles”: rather than using one large disk, it uses several smaller disks with the same aggregate storage space. Each disk is capable of positioning and transferring independently, so the effective throughput increases by a factor close to the number of disks used.
The exact throughput improvement is, of course, smaller than the number of disks involved: although each drive is capable of transferring in parallel, there is no way to ensure that the requests are evenly distributed across the drives. Inevitably the load on one drive will be higher than on another.
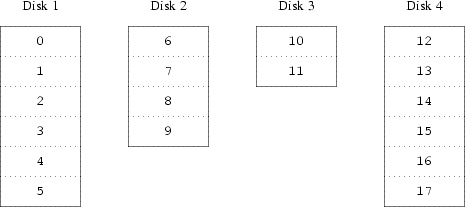
The evenness of the load on the disks is strongly dependent on the way the data is shared across the drives. In the following discussion, it is convenient to think of the disk storage as a large number of data sectors which are addressable by number, rather like the pages in a book. The most obvious method is to divide the virtual disk into groups of consecutive sectors the size of the individual physical disks and store them in this manner, rather like taking a large book and tearing it into smaller sections. This method is called concatenation and has the advantage that the disks are not required to have any specific size relationships. It works well when the access to the virtual disk is spread evenly about its address space. When access is concentrated on a smaller area, the improvement is less marked. Figure 17-1 illustrates the sequence in which storage units are allocated in a concatenated organization.
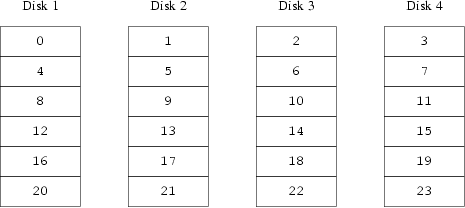
An alternative mapping is to divide the address space into smaller, equal-sized components and store them sequentially on different devices. For example, the first 256 sectors may be stored on the first disk, the next 256 sectors on the next disk and so on. After filling the last disk, the process repeats until the disks are full. This mapping is called striping or RAID-0 [1]. Striping requires somewhat more effort to locate the data, and it can cause additional I/O load where a transfer is spread over multiple disks, but it can also provide a more constant load across the disks. Figure 17-2 illustrates the sequence in which storage units are allocated in a striped organization.
Notes
| [1] |
RAID stands for Redundant Array of Inexpensive Disks and offers various forms of fault tolerance, though the latter term is somewhat misleading: it provides no redundancy. |
This, and other documents, can be downloaded from ftp://ftp.FreeBSD.org/pub/FreeBSD/doc/.
For questions about FreeBSD, read the documentation before contacting <questions@FreeBSD.org>.
For questions about this documentation, e-mail <doc@FreeBSD.org>.
Hosting by: Hurra Communications Ltd.
Generated: 2007-01-26 17:58:43